About
Descriptions:
• Model CBT-C4A1 sorting robot control system is IPC-based, software-featured and open-type control system, which characterized as using software to achieve the hardware function of motion controller. IPC-based real-time core technology and programming environment combined with a variety of I / O devices and machine vision systems to form a complete set of real-time control solution through fieldbus technology integration of various I / O, soft PLC, NC and machine vision system.
• CBT-C4A1 sorting robot control software offers a deeper level of openness in customization that supports underlying motion control strategies (algorithms) in addition to support customization of upper-level software programs (program editing, human-machine interface, etc.). The flexibility of software implementation and hardware platform independence will help the system achieve more openness and rapid growth of system performance, meanwhile, it is convenient for users to carry out second development and upgrade, which is in line with the development trend of information technology.
Technical Feature:
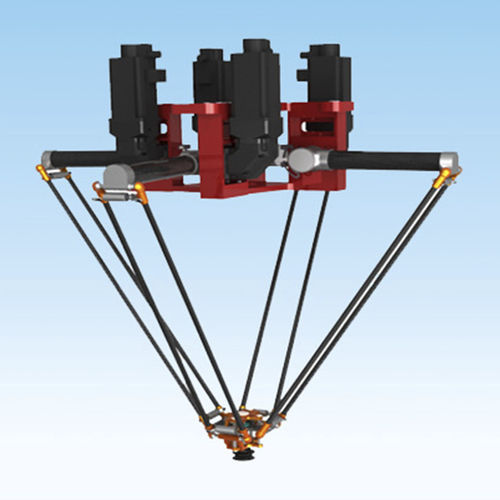
• The chain branched structure adopting the pre-fastened Hooke Hinge has independent intellectual property rights, can effectively expand the working space of the robot and ensure the robot's movement performance.
• By adding the installation of telescopic and rotating shaft, the robot can achieved end effector’s rotation, the movement and placement of sorted objects in space so as to expand the application scope of the robot.
PARAMETERS
| Parameter Name | Parameter Value |
|---|---|
| Type |
parallel
|
| Number of axes |
4-axis
|
| Function |
sorting
|
| Application domain |
for the food industry
|
| Payload (kg) |
3 - 3
|
| Repeatability (mm) |
0.1 - 0.1
|